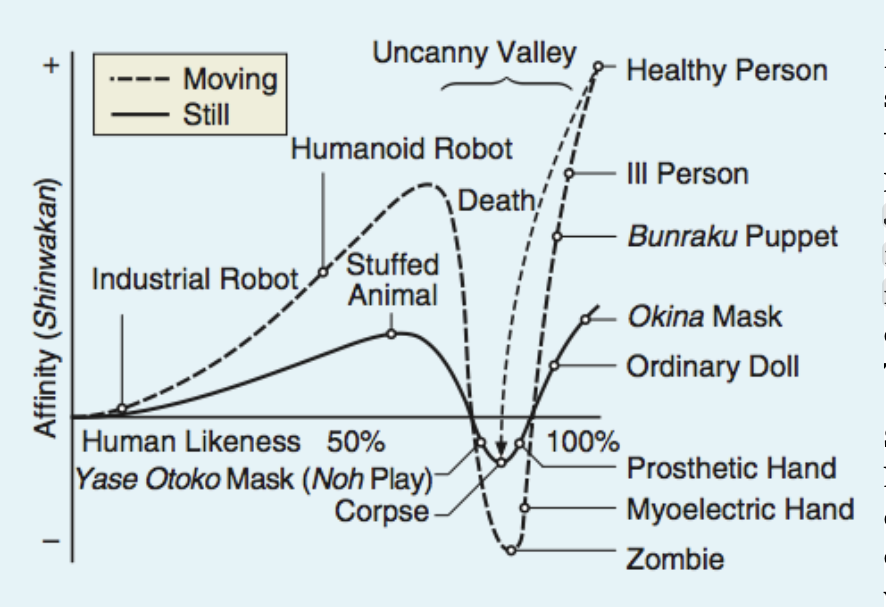
While thinking about the appearance of my project, I felt I should learn more about the uncanny valley effect, so I read the text by Masahiro Mori who first proposed it. His essay, published in 1970 in a Japanese magazine, presents a phenomenon predicted through the development of robotic technology. He says that people’s sense of affinity changes depending on how similar a robot’s appearance is to that of a human. When a robot’s appearance is not very similar to a human, or only functionally similar, people feel more affinity toward it. For example, an industrial robotic arm does not resemble a human much, but because it looks somewhat like the human element of an “arm,” and its function is similar as well, humans feel slightly more affection toward it compared to other robots. Toy robots resemble humans more than an industrial robot arm. They stand on two legs, walk, make sounds, and have many features externally and functionally similar to humans. Mori thought of this as roughly 50% similarity. Up to this level of similarity, or slightly beyond, human affinity or likability rises in a steep upward curve. However, at a certain point—when a robot resembles a human more closely but still cannot hide its essential differences—people begin to feel discomfort. For instance, if someone with a prosthetic arm has one that looks exactly like a human arm, but when shaking hands at night someone feels its hardness and coldness, the emotional reaction would likely be fear or surprise. This is what Mori calls the uncanny valley effect.
At a time when the robotics industry was growing and all robotic development was advancing toward human-like appearances, Mori argued for considering the uncanny valley effect, saying that robots should instead develop in ways that do not resemble humans too closely (for example, a prosthetic arm whose appearance clearly shows that it is a prosthetic). In such cases, people would not feel unpleasant emotions. In short, he argued that robots should remain robot-like, and humans should remain human-like.
What I did not previously know was the precise interpretation of the uncanny valley effect. I thought it referred to the vague discomfort people feel when something non-human appears human-like. But Mori says that when the resemblance is moderate, humans actually feel more affinity. When you think about it, it makes sense. In today’s era of advanced automation, looking at robot-arm-operated cafés or at works like Can’t Help Myself, people often feel a sense of cuteness or pity toward the robotic arms—emotions far from discomfort, yet also emotions one would not normally expect to feel toward a machine.

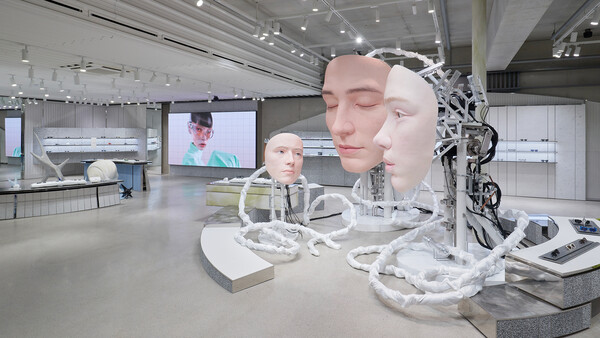
The sunglasses brand Gentle Monster, famous for its distinctive branding, generated a lot of buzz for its marketing style. Their stores are designed like exhibition spaces, with combinations of robots and mechanical elements. Many people surprisingly feel strong discomfort there. Large face-shaped robots with human-like faces are installed in the store, showing repetitive and mechanical movements. This could be considered a representative example of the uncanny valley phenomenon.
What I ultimately want to say is this: if I attach lips to the speaker in my project, will people feel discomfort, or will they actually feel more affinity? Thinking again, I don’t think people would feel the uncanny valley effect just because a speaker has lips attached. Rather, they might come to treat the speaker as a mouth. By attaching lips, it gives the suggestion that “this is something that speaks.” If so, is this the effect I want? I think so. I want viewers to pay close attention to what these speakers are saying. But I am still unsure whether this is truly the direction I want. First, I should buy fake lips and attach them to the speaker to see how I feel about it.